|

|
Waffenstabilisator Cadillac
Gage für die Kampfpanzer M1 und M1A1 Der
Kampfpanzer M1 Abrams entstand letztlich aus der gemeinsam mit Deutschland
betriebenen Entwicklung des Kampfpanzers MBT 70. Ein
wesentliches Element der Waffenstabilisierung des MBT 70
war die unabhängige Stabilisierung der Visierline des Hauptzielfernrohres
in der vertikalen und der horizontalen Ebene bei Nachführung
von Turm und Kanone auf die Visierlinie. Nach dem Abbruch der
Entwicklungsarbeiten gingen die amerikanischen Konstrukteure
für den neuem Standardkampfpanzer M1 einen anderen Weg. Sie verzichteten insbesondere auf die unabhängige
Stabilisierung in der horizontalen Ebene. Die Gründe sind vermutlich
im Ziel der Vereinfachung und der Kostenminimierung zu suchen.
So entstand ein zuverlässiges und präzises Stabilisierungssystem, bei Inkaufnahme
von Leistungseinbußen bei Teilparametern.
 Das Stabilisierungssystem
des M1 ist ein elektrohydraulisches System mit unabhängiger
Stabilisierung der Visierlinie in der vertikalen Ebene und Strichbildstabilisierung
in der horizontalen Ebene. Die Kanone wird in der Vertikalen
dem stabilisierten Kopfspiegel des Hauptzielfernrohres nachgeführt.
Der Turm wird zur Realisierung von Vorhalten entgegengesetzt
zu den horizontalen Bewegungen des Strichbildes verdreht. In
gewissen Grenzen können Turmbewegungen in der Horizontalen, infolge
Lenkbewegungen, nach dem gleichen Prinzip ausgeglichen werden,
um so dem Richtschützen ein relativ ruhiges Begleiten von Zielen
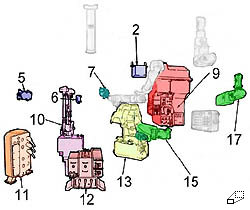
zu ermöglichen. Die Hauptteile sind die Ausblickeinheit des
Zielfernrohres (9),
der Turmkreiselblock (5), Waffenkreiselblock (6), der
Erhöhungsgeber der Kanone (7), die elektrohydraulische Richtanlage
in der Vertikalen (10) und in der Horizontalen (13), der
Turmhauptkasten (11),
die Elektronikeinheit (12), die Richtgriffe des Richtschützen
(15) und Kommandant (17), der Verkantungssensor
(2), der Sensor der Richtgeschwindigkeit in der Seite
und weitere Baugruppen. Das Stabilisierungssystem
des M1 ist ein elektrohydraulisches System mit unabhängiger
Stabilisierung der Visierlinie in der vertikalen Ebene und Strichbildstabilisierung
in der horizontalen Ebene. Die Kanone wird in der Vertikalen
dem stabilisierten Kopfspiegel des Hauptzielfernrohres nachgeführt.
Der Turm wird zur Realisierung von Vorhalten entgegengesetzt
zu den horizontalen Bewegungen des Strichbildes verdreht. In
gewissen Grenzen können Turmbewegungen in der Horizontalen, infolge
Lenkbewegungen, nach dem gleichen Prinzip ausgeglichen werden,
um so dem Richtschützen ein relativ ruhiges Begleiten von Zielen
zu ermöglichen. Die Hauptteile sind die Ausblickeinheit des
Zielfernrohres (9),
der Turmkreiselblock (5), Waffenkreiselblock (6), der
Erhöhungsgeber der Kanone (7), die elektrohydraulische Richtanlage
in der Vertikalen (10) und in der Horizontalen (13), der
Turmhauptkasten (11),
die Elektronikeinheit (12), die Richtgriffe des Richtschützen
(15) und Kommandant (17), der Verkantungssensor
(2), der Sensor der Richtgeschwindigkeit in der Seite
und weitere Baugruppen.
Die Anlage ermöglicht drei Betriebsstufen:
Im NORMAL-Modus werden Turm, Kanone
und Visierlinie (nur Vertikal) stabilisiert. Das Strichbild
wird in der horizontalen Ebene stabilisiert, wobei der Turm
entgegengesetzt zur Strichbildbewegung verdreht wird. Vorhalten
werden über den Feuerleitrechner und die Strichbildsteuerung
realisiert. Nur in diesem Modus ist das Schießen aus der Bewegung
möglich. Beim Stabilisieren werden Signale von Turmkreisel,
Wannenkreisel, Waffenkreisel und den Kreiseln in der Ausblickeinheit
des Zielfernrohres sowie des Waffenerhöhungsgebers an den Feuerleitrechner
gesendet. Dieser empfängt zusätzlich permanent Signale vom Windmesser,
Entfernungsmesser und vom Richtgeschwindigkeitsgeber für die
Vorhalteberechnung. Der Rechner steuert die Stabilisierungselektronik
und die Strichbildverstellung an und hält somit Turm, Kanone
und Strichbild in der Solllage. Beim Richten über die Richtgriffe
werden die Stabilisierungssignale der Kreisel und Sensoren an
die Elektronikbaugruppe elektrisch übersteuert. Gehen die Richtgriffe
in die Nulllage zurück, wird die Stabilisierung kontinuierlich
fortgesetzt. Die Stabilisierung der Visierlinie in der vertikalen
Ebene erfolgt innerhalb der Baugruppe der Ausblickeinheit des
Zielfernrohres. An den Richtgriffen muss der Sicherheitsschalter
gedrückt werden, beim Loslassen der Sicherheitsschalter wird
die Stabilisierungsanlage auf Standby umgeschaltet, Turm und
Kanone sind in diesem Fall nicht länger stabilisiert.
Im
EMERGENCY-Modus gehen die Richtsignale der Richtgriffe
, unter Umgehung der Stabilisierungselektronik, direkt an die
hydraulische Richtanlage. Die Kreisel werden abgekoppelt, das
stabilisierte Schießen aus der Bewegung ist nicht möglich. Das
Hauptzielfernrohr ist an die Bewegung der Kanone angekoppelt.
Nach dem Messen der Entfernung muss die Richtmarke erneut auf
das Ziel nachgerichtet werden, da der Spiegel in eine neue Lage
entsprechend der Entfernung geht. Für notwendige Vorhalte
muss der Turm nachgerichtet werden, wenn das Strichbild die
Position verändert.
Im
MANUAL-Modus kann mit den Handkurbeln für Höhe und Seite
manuell gerichtet werden, falls die Hydraulikanlage ausgefallen
oder nicht betriebsbereit ist.
Das
System der vertikalen Stabilisierung. Die
zentrale Baugruppe des Stabilisierungssystems ist die Ausblickeinheit
des Hauptzielfernrohres. Sie enthält einen hochpolierten Spiegel
aus einer Aluminiumlegierung, der vertikal beweglich aufgehängt
ist und durch einen speziellen Elektromotor direkt vertikal verdreht
werden kann. Zusätzlich enthält die Ausblickbaugruppe zwei Kreisel
mit zwei  Freiheitsgraden,
je einen für die Vertikale und einen für die Horizontale, sowie Resolver, und Winkelgeschwindigkeitsgeber. Freiheitsgraden,
je einen für die Vertikale und einen für die Horizontale, sowie Resolver, und Winkelgeschwindigkeitsgeber.
Die
Signale des Kreisels für die vertikale Ebene werden mit dem Signal
der Winkelgeschwindigkeit gemischt und an die Stabilisierungselektronik
übergeben, die den vertikalen Spiegelantrieb steuert. Der an
der Turmbasis befestigte Kreiselblock hat die Aufgabe,die Signale
für die Stabilisierung der Kanone in der vertikalen Ebene auszugeben.
Dadurch wird die Kanone unabhängig von den Bewegungen des
Kopfspiegels stabilisiert. Ein zusätzlicher Kreiselblock am
beweglichen Teil der Kanone und der Vertikalresolver am Kopfspiegel
erhöhen die Stabilisierungsgenauigkeit durch Messen des Fehlerwinkels
und eine kontinuierliche Korrektur der Solllage der Kanone. Dabei wird
die Lage der Kanone ständig mit der Lage des Kopfspiegels abgeglichen.
die Kanone wird im NORMAL-Modus dem Kopfspiegel nachgeführt. Die Druckdifferenzen
an den Anschlüssen des Höhenrichtzylinders werden durch Sensoren
erfasst und das resultierende Signal ebenfalls an die Stabilisierungselektronik
übergeben, um die Stabilisierungsgenauigkeit weiter zu erhöhen.
Der Erhöhungsgeber an der Kanone gibt ein Signal aus, das die
Winkeldifferenz zwischen Kanone und dem festen Turmteil anzeigt.
Die Stabilisierungselektronik errechnet daraus die Winkeldifferenz
zwischen Kanone und Visierlinie. Wird durch den ballistischen
Rechner für das Schießen eine bestimmte Rohrerhöhung ausgegeben,
dann geht dieses Signal in die Stabilisierungselektronik ein.
Diese steuert den Höhenrichtzylinder an und die Kanone wird
in die neue Solllage überführt, die Visierlinie bleibt auf das
Ziel stabilisiert. Wird der gemessene Fehlerwinkel durch heftige
Stabilisierungsbewegungen der Kanone zu groß, wird die
Abfeuerung solange blockiert, bis die Abweichung wieder im Toleranzbereich
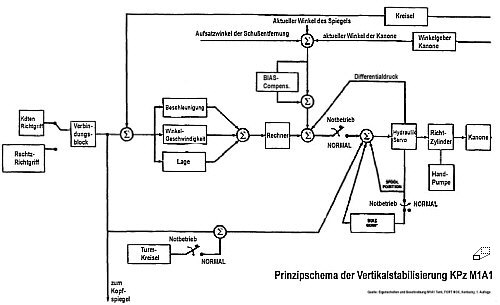
liegt. Das folgende Schema zeigt den prinzipiellen
Aufbau der Vertikalstabilisierung:
Bei Ausfall der Feuerleitanlage
kann in den Notbetriebs-Modus umgeschaltet werden. In diesem
Fall werden die Signale der Kreisel in der Ausblickeinheit und der Turmkreisel
abgeschaltet. Die Kanone kann hydraulisch gerichtet werden,
die Stabilisierung ist nicht in Funktion. Der Kopfspiegel wird
elektromechanisch an die Bewegungen der Kanone angekoppelt.
Nach dem Messen der Entfernung muss die Richtmarke erneut auf
das Ziel nachgerichtet werden, da der Spiegel eine neue Lage
entsprechend der Entfernung einnimmt.
Das
System der horizontalen Stabilisierung. Der Turm ist
über zwei Kreiselblöcke, die Stabilisierungselektronik und den
hydraulischen Seitenrichtantrieb stabilisiert. Die Visierlinie
ist nicht in der horizontalen Ebene stabilisiert.
Der erste
Kreisel ist in der Wanne unter dem Turmkorbboden untergebracht.
Er reagiert auf die Bewegungen der Wanne in der horizontalen
Ebene. Sein Signal ist die Grundlage für die Erarbeitung der
Stabilisierungssignale im Elektronikblock und die Ansteuerung
des Seitenrichtantriebs. Der Turmkreisel misst die Signale in
der Ebene des Turmdrehkranzes, die mit den Signalen des Wannenkreisels
summiert werden. Dies erhöht die Stabilisierungsgenauigkeit
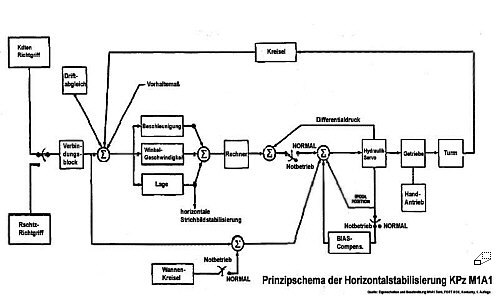
erheblich. Das Schema zeigt den prinzipiellen
Aufbau der Horizontalstabilisierung:
Bei Ausfall der Feuerleitanlage
kann in den Notbetriebs-Modus umgeschaltet werden. In diesem
Fall werden die Signale des Wannenkreisels und des Turmkreisel
abgeschaltet. Der Turm kann hydraulisch gedreht werden, die
Stabilisierung ist nicht in Funktion. Für notwendige Vorhalte
muss der Turm nachgerichtet werden, wenn das Strichbild entsprechend
der Signale des Feuerleitrechners die
Position verändert.
 Eine
Besonderheit des M1 Abrams stellt die "Line
of Sigth Compensation" dar, faktisch eine Stabilisierung des Strichbildes
in der horizontalen Ebene. Auf eine vollwertige Stabilisierung
der Visierlinie in der Horizontalen hatten die Entwickler, wie
bereits erwähnt, aus Kostengründen verzichtet. Deshalb entschloss
man sich, das Prinzip der Stabilisierung des Strichbildes zu
nutzen. Dabei wird nur das Strichbild stabilisiert, das Sichtfeld
wird in horizontaler Ebene nur durch den Turm stabilisiert.
Der wesentlichste Nachteil besteht, insbesondere auf größere
Entfernungen, in einer geringeren Bildauflösung im Okular infolge
der relativen seitlichen Bildbewegung. Eine
Besonderheit des M1 Abrams stellt die "Line
of Sigth Compensation" dar, faktisch eine Stabilisierung des Strichbildes
in der horizontalen Ebene. Auf eine vollwertige Stabilisierung
der Visierlinie in der Horizontalen hatten die Entwickler, wie
bereits erwähnt, aus Kostengründen verzichtet. Deshalb entschloss
man sich, das Prinzip der Stabilisierung des Strichbildes zu
nutzen. Dabei wird nur das Strichbild stabilisiert, das Sichtfeld
wird in horizontaler Ebene nur durch den Turm stabilisiert.
Der wesentlichste Nachteil besteht, insbesondere auf größere
Entfernungen, in einer geringeren Bildauflösung im Okular infolge
der relativen seitlichen Bildbewegung.
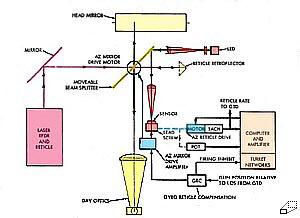
Das linke Schema zeigt
das Funktionsprinzip der Strichbildstabilisierung. Der Laserentfernungsmessblock (violett)
leuchtet das Strichbild durch den halbdurchlässigen Spiegel
der horizontalen Sichtebene (dunkelgelb) hindurch auf
ein Umkehrprisma, von dem das Strichbild auf die Spiegelrückseite
reflektiert und von dieser um 90 Grad nach unten ins Sichtfeld des
Richtschützen umgelenkt wird. Der Tagsichtkanal verläuft direkt und
geradlinig durch den Spiegel. Der Spiegel wirkt als Strahlenteiler,
in dem die Strahlenverläufe des Tagkanals (hellgelb),
des Laser-Entfernungsmessers (violett) und des Strichbildes
(violett) gebündelt
und verteilt werden. Eine Leuchtdiode (rot) strahlt
einen permanenten Lichtstrahl über den halbdurchlässigen Spiegel
(dunkelgelb) auf einen Fotosensor (rot). In der
Solllage trifft der Strahl der Leuchtdiode ins Zentrum des Fotosensors.
Kommt es zu Bewegungen des Turmes in der horizontalen Ebene,
die nicht vollständig von der Vorstabilisierung ausgeglichen
werden können, so gibt der Horizontalkreisel in der Ausblickeinheit
des Hauptzielfernrohres ein entsprechendes Signal aus, das von
der Stabilisierungselektronik verarbeitet wird und in der Folge
den Motor
der mechanischen Verstellung (blau) des Fotossensors ansteuert.
Der Fotosensor wird entsprechend der Abweichung von der Solllage
seitlich verschoben. In der Folge geht der Lichtstrahl der Leuchtdiode
vom Zentrum des Fotosensor weg in den Randbereich. Die Steuerelektronik
erkennt die Abweichung vom Zentrum des Fotosensors, steuert
den Signalverstärker (blau) des Verstellmotors des Spiegels an und der
halbdurchlässige
Spiegel wird soweit verdreht, bis der Lichtstrahl der Leuchtdiode wieder auf
das Zentrum des Fotosensors trifft. Zur Erhöhung der Stabilisierungsgenauigkeit
wird die Verstellgeschwindigkeit des halbdurchlässigen Spiegel
gemessen und berücksichtigt.
Für das Berücksichtigung von Vorhalten
beim Schießen aus der Bewegung und auf bewegliche Ziele wird
beim Betätigen des Laser-Entfernungsmessers die Berechnung des
Vorhaltemaßes ausgelöst. Ab diesem Zeitpunkt erfolgt eine gleitende
Berechnung des Durchschnitts der Richtgeschwindigkeit der letzten
1,5 bis 2 Sekunden. Der Feuerleitrechner steuert nach dem Durchschnittswert
den Verstellmotor des Fotosensors an, welcher entsprechend
des errechneten Vorhaltemaßes verschoben wird. Wie schon weiter
oben beschrieben, führt die Auslenkung des Lichtstrahls der
Leuchtdiode aus dem Zentrum des Fotosensors zu einem Korrektursignal,
der halbduchlässige Spiegel wird um die Vorhalte und gleichzeitig
der Turm entgegengesetzt verdreht, so dass der Richtschütze
das Ziel weiterhin mit der zentralen Richtmarke begleiten und
bei Anzeige der Feuerbereitschaft bekämpfen kann. Trifft der
Lichtstrahl der Leuchtdiode infolge starker Stabilisierungsbewegungen
des Turms nicht das Zentrum des Fotosensors, wird die Abfeuerung
solange blockiert, bis die Abweichung wieder im Toleranzbereich liegt.
Das hydraulische Richtsystem umfasst
den Höhenrichtzylinder und den Hydromotor des Seitenrichtantriebes
sowie die Hydraulikversorgung. .
Der notwendige Arbeitsdruck von 105 bis 119 kp/cm2 wird von einer
Pumpe am Haupttriebwerk als permanenter Druckstrom bereitgestellt. Ein Druckmesser links
vom Hauptzielfernrohr zeigt den aktuellen Druck an. Das System
fasst 75,7 Liter Hydrauliköl. Im Notfall kann ein über die
Bordspannung elektrisch betriebenes System eine gewisse Zeit
den erforderlichen Druck sicherstellen. Ein Großteil der Kampfpanzer
ab Version M1A1
ist zusätzlich mit einem Hilfsgenerator am Turmheck ausgestattet..
Die
wichtigsten Kenndaten:
|
|
NORMAL-Mode (Stab.)
|
MANUAL-Mode (Hand)
|
|
Richtgeschwindigkeit, vertikal,
normal
|
0,25 bis 25 Strich / sec
|
10 Strich / Umdrehung Handkurbel
|
|
Richtgeschwindigkeit, vertikal
maximal
|
400 Strich / sec (Richtgriffe)
750
Strich / sec (Stab.)
|
-
|
|
Richtgeschwindigkeit, vertikal,
externe Hydraulikversorgung
|
bis zu 25 Strich / sec
|
|
|
Richtgeschwindigkeit, horizontal,
normal
|
0,25 bis 75 Strich / sec
|
5 oder 10 Strich / Umdrehung Handkurbel
|
|
Richtgeschwindigkeit, horizontal, maximal
|
750 Strich / sec
|
-
|
|
Richtgeschwindigkeit, horizontal
externe Hydraulikversorgung
|
bis zu 75 Strich / sec
|
|
|
Richtbereich, vertikal,
(110 Grad links/rechts
12 Uhr)
|
-10 bis +20 Grad
|
-10 bis +20 Grad
|
|
Richtbereich, vertikal,
(70 Grad links/rechts
06 Uhr)
|
0 bis +20 Grad
|
0 bis +20 Grad
|
|
)
)
)
)
)